Cascade control for feed drive systems
Author affiliations
DOI:
https://doi.org/10.15625/0866-7136/22269Keywords:
cascade control, CNC tool machines, feed drive systems, fractional-order controllers, internal model controlAbstract
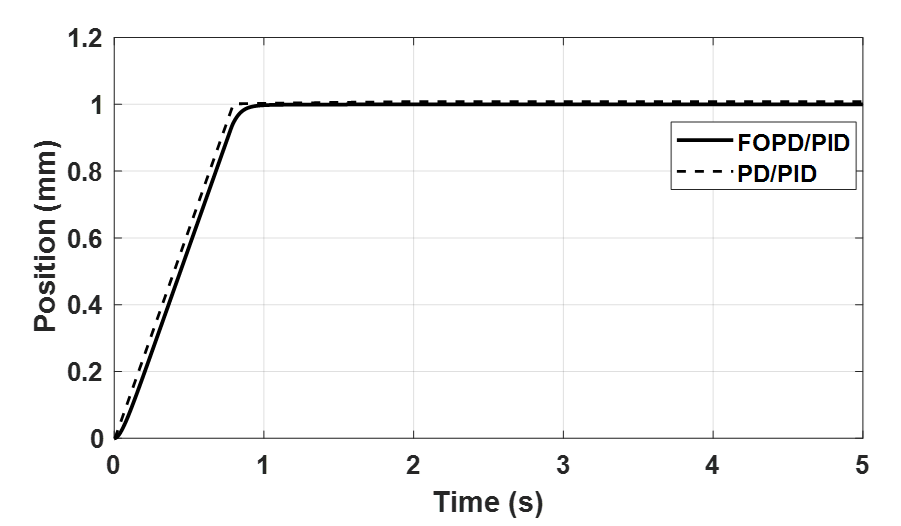
In the machining industry, the demands for precision and high speed of machine tools in CNC machines are increasingly high. The crucial component of these kinds of machines is a feed drive (FD) system, which comprises a servo motor coupled with a ball screw. Therefore, in this paper, a cascade scheme consisting of an inner and outer loop, which are also called the secondary and primary loops respectively, is suggested to control the feed drive system to improve the system's performance regarding tracking control and disturbance rejection. A filtered proportional integral (PI) controller is suggested for the secondary loop, and its tuning guidelines are established through the internal model control (IMC) approach. Additionally, a fractional-order proportional derivative (FOPD) controller and its design methodology in the frequency domain are introduced for the primary loop. The robust stability of the controlled system is assured by the maximum sensitivity function (Ms value). The investigation carried out through simulation focused on the feed drive system, and the findings indicated that the suggested control strategies fulfill the stringent criteria of a servo system.
Downloads
References
[1] Y. Altintas, A. Verl, C. Brecher, L. Uriarte, and G. Pritschow. Machine tool feed drives. CIRP Annals, 60, (2), (2011), pp. 779–796. https://doi.org/10.1016/j.cirp.2011.05.010.
[2] S. Tiwari, A. Bhatt, A. C. Unni, J. G. Singh, and W. Ongsakul. Control of DC motor using genetic algorithm based PID controller. In 2018 International Conference and Utility Exhibition on Green Energy for Sustainable Development (ICUE), IEEE, (2018), pp. 1–6. https://doi.org/10.23919/icue-gesd.2018.8635662.
[3] S.-H. Suh, S. K. Kang, D.-H. Chung, and I. Stroud. Theory and design of CNC systems. Springer Science & Business Media, (2008).
[4] Z. Sun, G. Pritschow, P. Zahn, and A. Lechler. A novel cascade control principle for feed drives of machine tools. CIRP Annals, 67, (1), (2018), pp. 389–392. https://doi.org/10.1016/j.cirp.2018.03.004.
[5] R. Garrido and A. Díaz. Cascade closed-loop control of solar trackers applied to HCPV systems. Renewable Energy, 97, (2016), pp. 689–696. https://doi.org/10.1016/j.renene.2016.06.022.
[6] E. Yumuk, M. Güzelkaya, and İ. Eksin. Analytical fractional PID controller design based on Bode’s ideal transfer function plus time delay. ISA Transactions, 91, (2019), pp. 196–206. https://doi.org/10.1016/j.isatra.2019.01.034.
[7] T. N. L. Vu, V. L. Chuong, N. T. N. Truong, and J. H. Jung. Analytical design of fractional-order PI controller for parallel cascade control systems. Applied Sciences, 12, (2022). https://doi.org/10.3390/app12042222.
[8] M. A. Siddiqui. Design of parallel cascade controller for nonlinear continuous stirred tank reactor. Scientific Reports, 15, (2025). https://doi.org/10.1038/s41598-025-89455-6.
[9] Y. Liu, Z. Z. Wang, Y. F. Wang, D. H. Wang, and J. F. Xu. Cascade tracking control of servo motor with robust adaptive fuzzy compensation. Information Sciences, 569, (2021), pp. 450– 468. https://doi.org/10.1016/j.ins.2021.03.065.
[10] V. Leipe, C. Hinze, A. Lechler, and A. Verl. Model predictive control for compliant feed drives with offset-free tracking behavior. Production Engineering, 17, (2023), pp. 805–814. https://doi.org/10.1007/s11740-023-01206-6.
[11] S. Jayaram and N. Venkatesan. Design and implementation of the fractional-order controllers for a real-time nonlinear process using the AGTM optimization technique. Scientific Reports, 14, (2024). https://doi.org/10.1038/s41598-024-82258-1.
[12] V. L. Chuong, N. H. Nam, L. H. Giang, and T. N. L. Vu. Robust fractional-order PI/PD controllers for a cascade control structure of servo systems. Fractal and Fractional, 8, (2024). https://doi.org/10.3390/fractalfract8040244.
[13] R. Sato and M. Tsutsumi. Mathematical model of feed drive systems consisting of AC servo motor and linear ball guide. Journal of the Japan Society for Precision Engineering, Contributed Papers, 71, (5), (2005), pp. 633–638. https://doi.org/10.2493/jspe.71.633.
[14] R. Sato and M. Tsutsumi. Modeling and controller tuning techniques for feed drive systems. In Dynamic Systems and Control, Parts A and B, ASMEDC, IMECE2005, (2005), pp. 669–679. https://doi.org/10.1115/imece2005-80596.
[15] T. N. L. Vu and M. Lee. Analytical design of fractional-order proportional-integral controllers for time-delay processes. ISA Transactions, 52, (2013), pp. 583–591. https://doi.org/10.1016/j.isatra.2013.06.003.
[16] S. Skogestad and I. Postlethwaite. Multivariable feedback control: analysis and design. John Wiley & Sons, 2nd edition, (2001).
[17] N. H. Nam, T. N. L. Vu, and V. L. Chuong. PID controller tuning rules for feed drive systems. In 2024 7th International Conference on Green Technology and Sustainable Development (GTSD), IEEE, (2024), pp. 159–164. https://doi.org/10.1109/gtsd62346.2024.10675245.
Downloads
Published
How to Cite
License

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.